Quick description
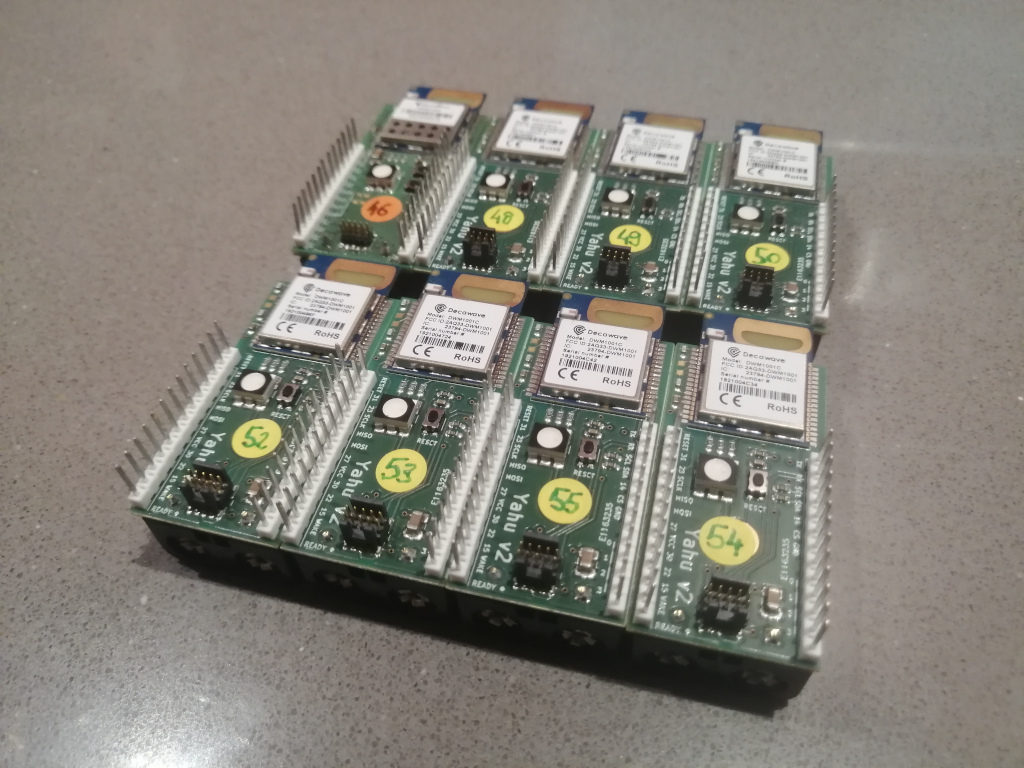
The Yahu (Yet Another Hardware for UWB) is based on the DecaWave DWM1001 module, which implements an Ultra-Wide Band (UWB) transceiver. Similar to the DecaWiNo, the Yahu enables wireless communication and ranging applications, i.e. distance evaluation between nodes.
The Yahu combines:
- The DecaWave DWM1001 module, i.e.:
- An ARM Cortex-M4 32-bit MCU (Nordic nRF52832),
- An IEEE 802.15.4-compatible UWB transceiver (DecaWave DW1000 transceiver),
- A BLE transceiver,
- A 3-axis accelerometer (STM LIS2DH12TR),
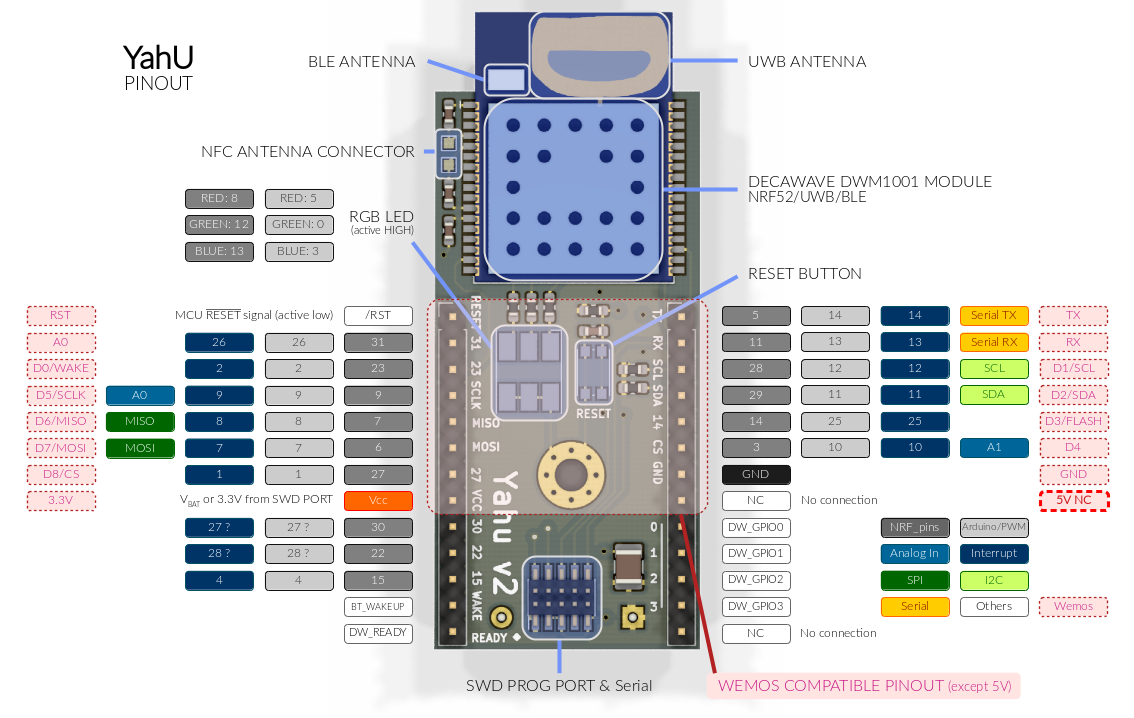
- An RGB LED,
- A SWD programmation port,
- 2 AAA-batteries support.
The unused pins of the DWM1001 are available on the pins present on both sides of the board and the final pinout is Wemos D1 mini-compatible. Wemos D1 mini shields can be used on the Yahu.
The Yahu can be used within either the Arduino or the DMOSDK framework.

Yahu
The Yahu has been designed by the IRIT lab in Toulouse, France (Institut de Recherche en Informatique de Toulouse).
Ranging
Thanks to the UWB transceiver, the Yahu is ranging capable, i.e. using precise message timestamping, two Yahus can evaluate the distance between them. The ranging precision is ~10cm in Line Of Sight (LOS) situations. To fully take advantage of the ranging capabilities, a ranging protocol such as Two-Way Ranging (TWR) must be implemented. Such a protocol implementation is available in the DecaDuino library examples.
Tutorials
In the Arduino context
- Install the software development tools
- Install the DecaDuino library
- Use the accelerometer
- Send and receive data between two or more Yahus using DecaDuino
- Enable ranging protocols with DecaDuino
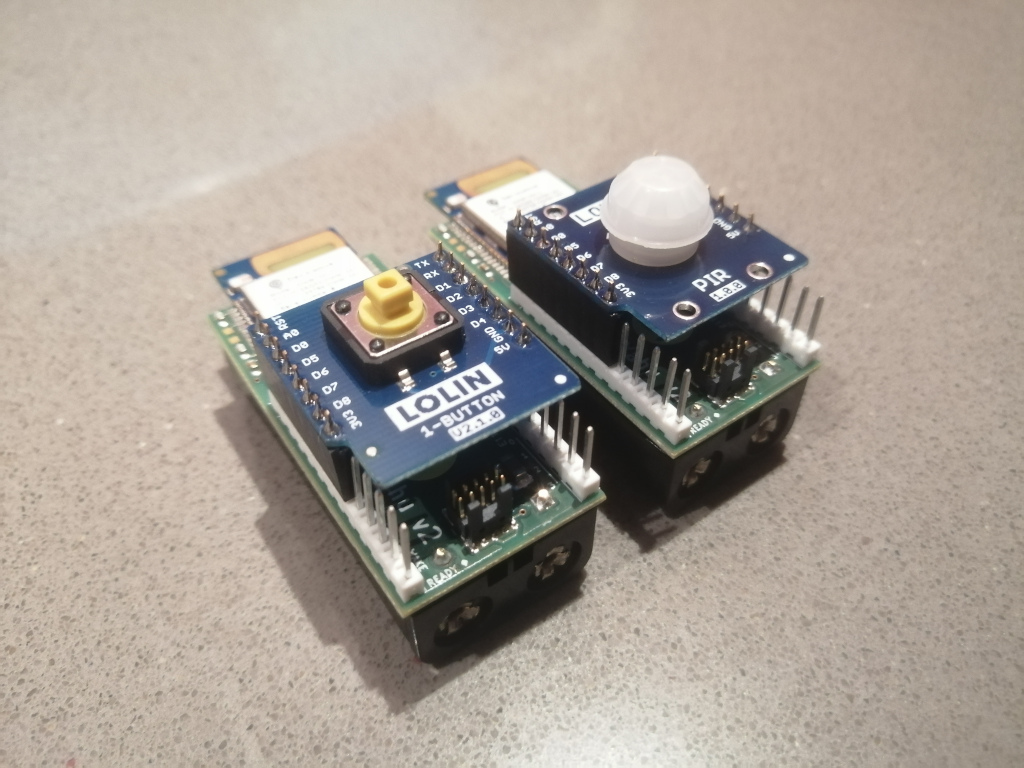
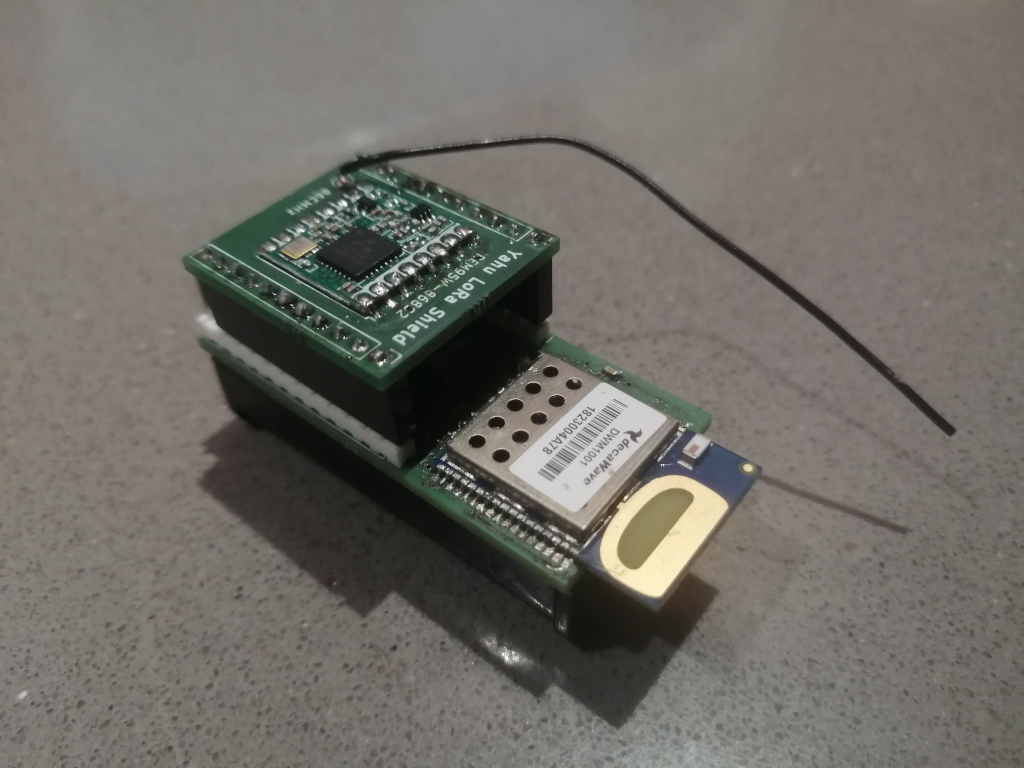
- Use Wemos D1 mini-compatible shields
In the DMOSDK context
Pinout
Libraries
| Category | Topic | Library | Adaptation | Download |
|---|---|---|---|---|
| Networking | DecaWave DW1000 | DecaDuino | Works out-of-the-box | [git] [zip] |
| Sensors | Accelerometer | DFRobot_LIS2DH12 | Add param to init() |
[git] [zip] |
Photo Gallery

|

|

|
|
|
|

|
|

|